Pitch & Roll airplane control using MPU6050
Pitch & Roll airplane control using MPU6050Подробнее

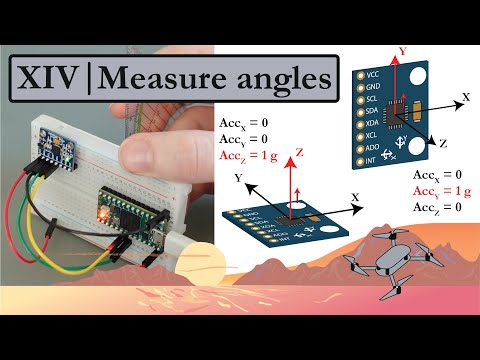
14 | Measure angles with the MPU6050 accelerometerПодробнее
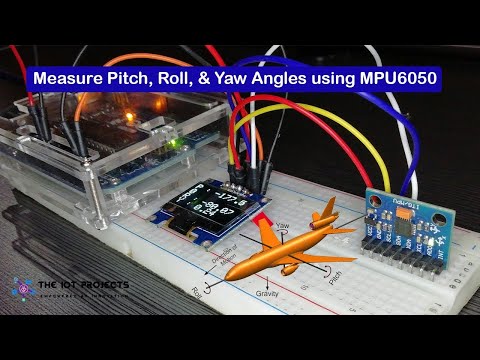
Measure Pitch Roll and Yaw Angles Using MPU6050 and ArduinoПодробнее
ARDUINO CONTROLLED STABILITY CONTROLПодробнее

How to Compute Roll and Pitch From AccelerometersПодробнее

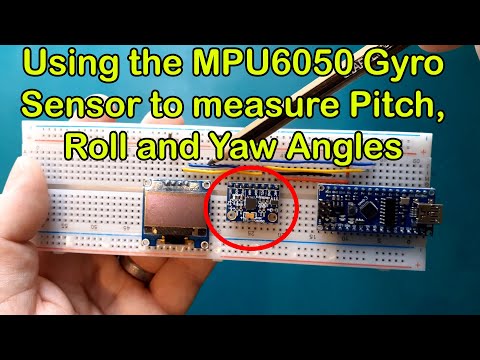
Gyro (Position) sensors (MPU6050) with Arduino - How to access Pitch, Roll and Yaw anglesПодробнее
TVC Rocket Flight software coding. MPU6050 kalman filter codeПодробнее

Tilt Sensing Using MPU6050 AccelerometerПодробнее

Roll, Yaw & Pitch using MPU6050Подробнее
