Measure Pitch Roll and Yaw Angles Using MPU6050 and Arduino
Pitch roll yaw angles with arduinoПодробнее

Flight controller with arduinoПодробнее

measure pitch roll and yaw angles using mpu6050 and arduinoПодробнее

BMI160 Accelerometer Gyroscope | BMI160 vs MPU6050 | Usage with Arduino, ESP32 & RPI PicoПодробнее

Sensor Fusion (MPU6050 + HMC5883L) || Kalman Filter || Measure Pitch, Roll, Yaw AccuratelyПодробнее
Measure Angles Easily with MPU6050 and ESP32: Part 2 - 3D Animation with Processing and ToxiclibsПодробнее

Measure Angles Easily with MPU6050 and ESP32: Part 1 - Library WalkthroughПодробнее
15 | Combine a gyroscope and accelerometer to measure angles - preciselyПодробнее
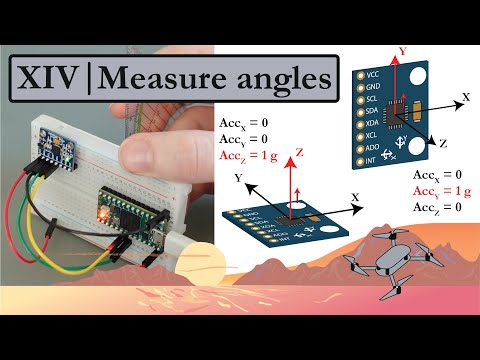
14 | Measure angles with the MPU6050 accelerometerПодробнее
5 | How to calibrate the MPU6050 with Arduino and TeensyПодробнее

4 | How to use the MPU6050 with Arduino and TeensyПодробнее

ARDUINO CONTROLLED STABILITY CONTROLПодробнее

ARDUINO CONTROLLED AEROPLANE STABILITY SIMULATION USING MPU 6050Подробнее

Detailed MPU6050 TutorialПодробнее

#Aeroplane_Simulator and Compass ✈ by using #MPU6050 , #Arduino.Подробнее

How to Compute Roll and Pitch From AccelerometersПодробнее

Gyro (Position) sensors (MPU6050) with Arduino - How to access Pitch, Roll and Yaw anglesПодробнее
[Arduino] Demonstrate an example of yaw, pitch and roll angle by using MPU6050/使用MPU6050計算出的飛行器角度Подробнее
![[Arduino] Demonstrate an example of yaw, pitch and roll angle by using MPU6050/使用MPU6050計算出的飛行器角度](https://img.youtube.com/vi/yzrgRN1KXFU/0.jpg)
TVC Rocket Flight software coding. MPU6050 kalman filter codeПодробнее
