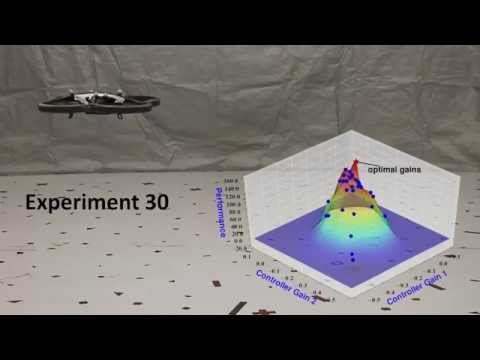
Safe Controller Optimization for Quadrotors
MPCC++: Model Predictive Contouring Control for Time-Optimal Flight with Safety Constraints (RSS'24)Подробнее

Quadrotor Control With Safety Embedded DDP Optimal Control Using Discrete Barrier StatesПодробнее

Towards Safe Human-Quadrotor Interaction: Mixed-Initiative Control via Real-Time NMPCПодробнее

Safe Automatic Controller Tuning for QuadrotorsПодробнее

Safe and Robust Quadrotor Maneuvers Based on Reach ControlПодробнее

Toward the Use of Model Predictive Control for Quadrotor Flight: RI Summer Scholar Fausto VegaПодробнее

Safe Learning-based Tracking Control for Quadrotors under Wind DisturbancesПодробнее

Multi-Fidelity Black-Box Optimization for Time-Optimal Quadrotor ManeuversПодробнее

Airways: Optimization-Based Planning of Quadrotor Trajectories according to High-Level User GoalsПодробнее

Control of Quadrotor using Nonlinear Model Predictive ControlПодробнее

Efficient Numerical Method for Optimal Control -- Quadrotor FlippingПодробнее

Robust Attitude Control for Quadrotors using Nonlinear Disturbance ObserverПодробнее

Optimal Flipping Control of QuadrotorПодробнее

Nonlinear Model Predictive Control on SE(3) for Quadrotor Trajectory Tracking and Obstacle AvoidanceПодробнее

Safety-Critical Control of a 3D Quadrotor with Range-Limited SensingПодробнее

Quadrotor Trajectory Optimization and Control - Underactuated Project Spring 2023Подробнее

PID autotuning via two-stage safe Bayesian optimization [...] | AI & Energy | Bratislav SvetozarevicПодробнее
![PID autotuning via two-stage safe Bayesian optimization [...] | AI & Energy | Bratislav Svetozarevic](https://img.youtube.com/vi/W_4FR_ecf6k/0.jpg)
Planning and Control for Quadrotor Flight through Cluttered EnvironmentsПодробнее

Fast Transitions of a Quadrocopter Fleet Using Convex OptimizationПодробнее

Optimization-based Path Planning for Multiple QuadrotorsПодробнее

Comparison of Trajectory Tracking Controller of Quadrotor on FlightGoggles - PID, Geometric TrackingПодробнее
