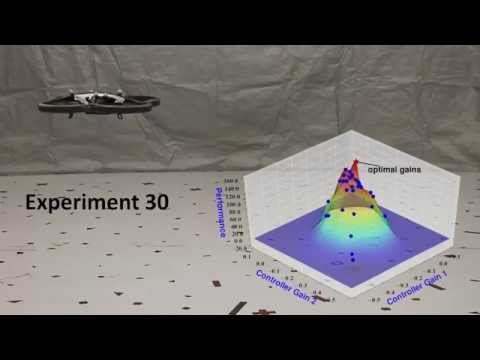
Safe Automatic Controller Tuning for Quadrotors

Safe Controller Optimization for QuadrotorsПодробнее
Lyapunov-Based Self-Tuning Geometric Control for a Quadrotor UAV-ExperimentПодробнее

Quadrotor Disturbance rejection - Manual Tuning of Controller ParametersПодробнее

DiffTune: Auto-Tuning through Auto-DifferentiationПодробнее

First tuning process with safeOpt (x-axis PID controller)Подробнее

PID Tuning of QuadrotorПодробнее

Safety-Critical Control of a 3D Quadrotor with Range-Limited SensingПодробнее

The In-Flight MRFT for quadrotor controllers tuningПодробнее

AutoTune: Controller Tuning for High-Speed FlightПодробнее

Safe Drone Flight with Time-varying Backup ControllersПодробнее

How to tune your PID on a quadcopter.Подробнее

Quadrotor flight video after tuning the controllerПодробнее

Pixhawk PID tuning part1Подробнее

(5/5) EagleTree Vector Series: The Safety/Nav Setup Tab (Failsafe/RTH/Loiter)Подробнее

Quadrotor disturbance rejection - Optimal Tuning Rule UsedПодробнее

Lesman Webinar: Control 101Подробнее

Iterative learning method for in-flight auto-tuning of UAV controllers (part I)Подробнее

Safe Handling of Multi-quadrotor Communication DropoutsПодробнее

Arducopter Tuning (AUTOTUNE, PIDs & FILTERS, FLIGHT TESTS!)Подробнее
