Modern Robotics, Chapter 3.2.2: Angular Velocities

Modern Robotics, Chapter 3.2.1: Rotation Matrices (Part 2 of 2)Подробнее

Modern Robotics, Chapter 8.2: Dynamics of a Single Rigid Body (Part 2 of 2)Подробнее

Modern Robotics, Chapter 5.1.2: Body JacobianПодробнее

Modern Robotics, Chapter 3.3.3: Exponential Coordinates of Rigid-Body MotionПодробнее

Modern Robotics, Chapter 3.3.2: Twists (Part 2 of 2)Подробнее

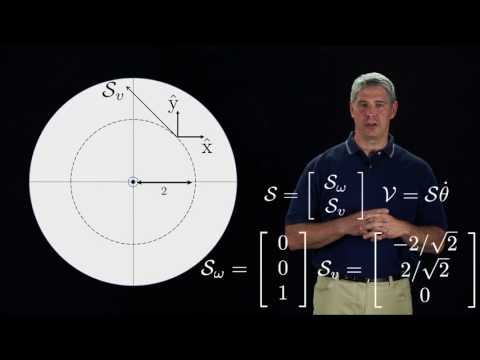
Modern Robotics, Chapter 3.3.2: Twists (Part 1 of 2)Подробнее
Modern Robotics, Chapter 3.2.3: Exponential Coordinates of Rotation (Part 2 of 2)Подробнее

Modern Robotics, Chapter 3.2.3: Exponential Coordinates of Rotation (Part 1 of 2)Подробнее

Modern Robotics, Chapter 3: Introduction to Rigid-Body MotionsПодробнее
