ROS Custom Python Nodes Deep Dive

ROS Topics and Nodes Deep DiveПодробнее

ROS Custom Launch Files Args , Params , RemapПодробнее

ROS custom MSG example (python side)Подробнее

Deep Dark ROS E4: Use python modules from other packages in ROS2Подробнее

ROS Tutorial: Subscriber and Publisher Nodes in Python from Scratch and Connect them Using TopicsПодробнее

Robot Leg Control using Python and ROSПодробнее

ROS TurtleSim demonstration with custom nodeПодробнее

Writing Custom Ros Package Turtlesim Node For RotatingПодробнее

ROS with Python3 in one minuteПодробнее

ROS Lesson 04 - Subscriber NodeПодробнее

ROS2 - Create a Package for Both C++ and Python NodesПодробнее

Set Parameters from another Node | ROS2 Humble Python TutorialПодробнее

ROS 2 Basics - Client Libraries - Parameters in PythonПодробнее

Communication Between Two ROS NodesПодробнее

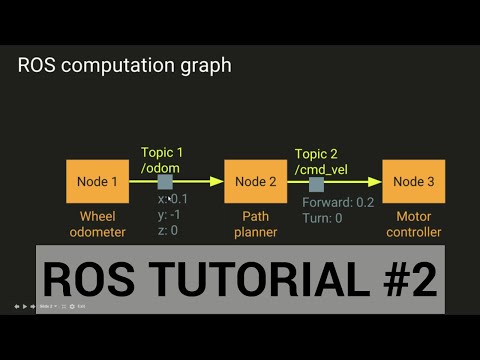
ROS tutorial #2: Publishers and subscribersПодробнее
ROS Services using custom applicationsПодробнее
