Linearization Problem Walkthrough

L'Hopital's Rule Problem WalkthroughПодробнее

2013 Physics E&M #2 -- RC-circuit Linearization Lab ProblemПодробнее

Linearization of aircraft dynamics example problem walkthroughПодробнее

International Zoom Inverse Problems Seminar, March 10, 2022, Yang Zhang (University of Washington)Подробнее

Guidance from Optimal Control - Section 1 Module 1 - Problem StatementПодробнее

A Bilevel Optimization Method for an Exact Solution to Equilibrium Problems with Binary VariablesПодробнее

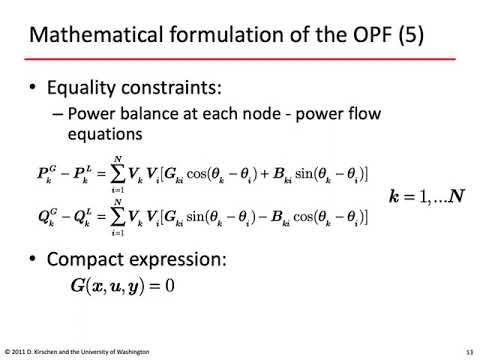
06 Optimal Power Flow - OPFПодробнее
Linearization Problem 2Подробнее

Linearization and DifferentialsПодробнее

Calculus 3 -- Properties of gradients; tangent planes; linearization -- PracticeПодробнее

L3 - Spring 2019: Problem Solution/LinearizationПодробнее

Lecture 18: Error approximationПодробнее

Linearization of a Nonlinear Dynamic System About A TrajectoryПодробнее

Solving Non linear and Parametric Engineering Problems Using Symbolic ComputationПодробнее

Mod-04 Lec-09 Classical Numerical Methods to Solve Optimal Control ProblemsПодробнее

Mod-07 Lec-16 Linearization of Nonlinear SystemsПодробнее

Mod-11 Lec-27 Linear Quadratic Regulator (LQR) Design - 1Подробнее

Mod-11 Lec-26 Classical Numerical Methods for Optimal ControlПодробнее
