AutoRob Lecture - Path Planning and Graph Search

AutoRob Lecture 16 - Potential fieldsПодробнее

AutoRob Lecture 13 - Bug AlgorithmsПодробнее

AutoRob Lecture 02 - Path PlanningПодробнее

31 - Planning using graph searchПодробнее

4.6a. AIPLAN - Backward Graph SearchПодробнее

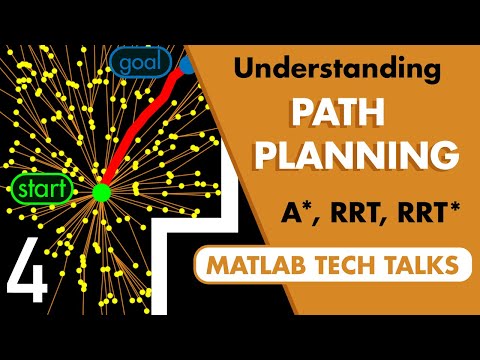
Path Planning with A* and RRT | Autonomous Navigation, Part 4Подробнее
AutoRob Lecture 15 - Sampling-based PlanningПодробнее

Implementation of A* Graph Search Algorithm for a 2D Path Planning Problem with ROSПодробнее
[1] Robotics Path Planning Breadth First Search (BFS)Подробнее
![[1] Robotics Path Planning Breadth First Search (BFS)](https://img.youtube.com/vi/EIX9txpVJU0/0.jpg)
Lecture 09: Path Planning and control of wheeled mobile robots_ Path PlanningПодробнее

Path Planning with GNNs (Graph Neural Networks)Подробнее

Lecture III.1 - Path PlanningПодробнее

Graph Search: Path PlanningПодробнее

Car Path PlanningПодробнее

03C Hierarchical Path Planning 1080pПодробнее

Lazy Trajectory Optimization with Graph-Search Planning for High DOF Robot in Cluttered EnvironmentsПодробнее

ICAPS 2018: Aditya Mandalika on "Lazy Receding Horizon A* for Efficient Path Planning in ..."Подробнее

Robotics 102 In-Class Activity - Graph Search and Pathfinding: Breadth First SearchПодробнее
