2 2 3 Lecture Video 4 of 4 Path Planning
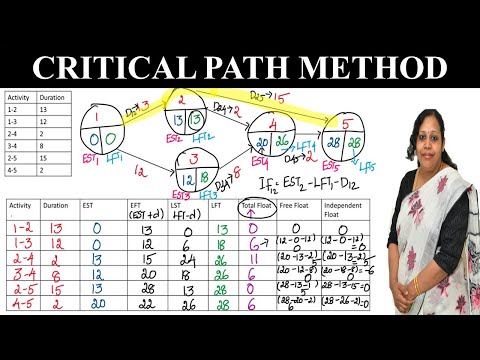
Critical path method, operations research, cpm, example problemПодробнее

L-4.10: Dijkstra's Algorithm - Single Source Shortest Path - Greedy MethodПодробнее

CPM in Project Management & Operations Research | How to do a Critical Path MethodПодробнее
Roadmap Based Path Planning: Visibility Graph and Generalised Voronoi Diagrams as roadmapsПодробнее

Robotics: Lecture 9: Path Planning (Assignment Problems)Подробнее

MCTE 521 Robot Motion Planning, Lecture 4 (2/3): Denavit-Hartenberg ConventionПодробнее

Lecture 11: Trajectory PlanningПодробнее

CPM (Critical Path Method) in Software Engineering | PERT/CPM NumericalПодробнее
Trajectory Planning for Robot ManipulatorsПодробнее

6.13 Dijkstra Algorithm | Single Source Shortest Path| Greedy MethodПодробнее

6.15 Floyd Warshall Algorithm All Pair Shortest Path algorithm | Data Structures and AlgorithmsПодробнее
Lecture 37: Robot Motion PlanningПодробнее

Lecture 21: Trajectory PlanningПодробнее

4.3 Matrix Chain Multiplication - Dynamic ProgrammingПодробнее
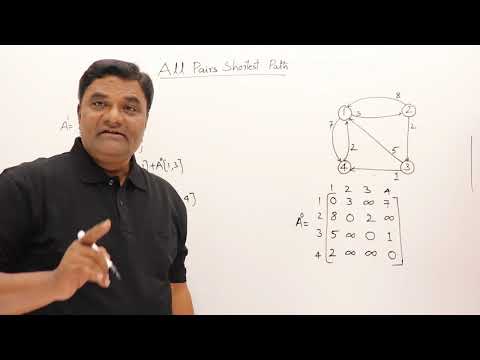
4.2 All Pairs Shortest Path (Floyd-Warshall) - Dynamic ProgrammingПодробнее
3.6 Dijkstra Algorithm - Single Source Shortest Path - Greedy MethodПодробнее

Robotics 2 U1 (Kinematics) S4 (Path Planning) P1 (Using the Jacobian)Подробнее

Intro2Robotics Lecture 22a: Path-planning, Two-Link Robot ArmПодробнее

Intro2Robotics Lecture 22c: Artificial Potential Fields for Robot Path PlanningПодробнее

Lecture 1 Part 2: Motion PlanningПодробнее
